NASA astronaut Jonny Kim poses for a portrait while wearing a spacesuit on July 17, 2024. In his first mission, Kim will serve as a flight engineer during Expedition 72/73 on the International Space Station. He will launch aboard the Soyuz MS-27 spacecraft on Tuesday, April 8.
Chosen by NASA in 2017, Kim is a decorated naval officer and medical doctor. He completed two years of training as an Astronaut Candidate; training included technical and operational instruction in International Space Station systems, Extravehicular Activities Operations, T-38 flight training, robotics, physiological training, expeditionary training, field geology, water and wilderness survival training, and Russian language proficiency training. In 2020, Kim began his support of International Space Station operations as a Capsule Communicator (CapCom) in Mission Control Center Houston and the Artemis program under the astronaut Exploration branch. He served as the International Space Station’s Increment Lead for Expedition 65 in 2021. He has continued to support mission and crew operations in various roles within the astronaut office including serving as the Operations Officer, T-38 Liaison to the Aircraft Operations Division and the interim ISS CapCom Chief Engineer.
NASA has selected 12 student teams to develop solutions for storing and transferring the super-cold liquid propellants needed for future long-term exploration beyond Earth orbit.
The agency’s 2025 Human Lander Challenge is designed to inspire and engage the next generation of engineers and scientists as NASA and its partners prepare to send astronauts to the Moon through the Artemis campaign in preparation for future missions to Mars. The commercial human landing systems will serve as the primary mode of transportation that will safely take astronauts and, later, large cargo from lunar orbit to the surface of the Moon and back.
For its second year, the competition invites university students and their faculty advisors to develop innovative, “cooler” solutions for in-space cryogenic, or super cold, liquid propellant storage and transfer systems. These cryogenic fluids, like liquid hydrogen or liquid oxygen, must stay extremely cold to remain in a liquid state, and the ability to effectively store and transfer them in space will be increasingly vital for future long-duration missions. Current technology allows cryogenic liquids to be stored for a relatively short amount of time, but future missions will require these systems to function effectively over several hours, weeks, and even months.
The 12 selected finalists have been awarded a $9,250 development stipend to further develop their concepts in preparation for the next stage of the competition.
The 2025 Human Lander Challenge finalist teams are:
California State Polytechnic University, Pomona, “THERMOSPRING: Thermal Exchange Reduction Mechanism using Optimized SPRING”
Colorado School of Mines, “MAST: Modular Adaptive Support Technology”
Embry-Riddle Aeronautical University, “Electrical Capacitance to High-resolution Observation (ECHO)”
Jacksonville University, “Cryogenic Complex: Cryogenic Tanks and Storage Systems – on the Moon and Cislunar Orbit”
Jacksonville University, “Cryogenic Fuel Storage and Transfer: The Human Interface – Monitoring and Mitigating Risks”
Massachusetts Institute of Technology, “THERMOS: Translunar Heat Rejection and Mixing for Orbital Sustainability”
Old Dominion University, “Structural Tensegrity for Optimized Retention in Microgravity (STORM)”
Texas A&M University, “Next-generation Cryogenic Transfer and Autonomous Refueling (NeCTAR)”
The College of New Jersey, “Cryogenic Orbital Siphoning System (CROSS)”
The Ohio State University, “Autonomous Magnetized Cryo-Couplers with Active Alignment Control for Propellant Transfer (AMCC-AAC)
University of Illinois, Urbana-Champaign, “Efficient Cryogenic Low Invasive Propellant Supply Exchange (ECLIPSE)”
Washington State University, “CRYPRESS Coupler for Liquid Hydrogen Transfer”
Finalist teams will now work to submit a technical paper further detailing their concepts. They will present their work to a panel of NASA and industry judges at the 2025 Human Lander Competition Forum in Huntsville, Alabama, near NASA’s Marshall Space Flight Center, in June 2025. The top three placing teams will share a total prize purse of $18,000.
“By engaging college students in solving critical challenges in cryogenic fluid technologies and systems-level solutions, NASA fosters a collaborative environment where academic research meets practical application,” said Tiffany Russell Lockett, office manager for the Human Landing System Mission Systems Management Office at NASA Marshall. “This partnership not only accelerates cryogenics technology development but also prepares the Artemis Generation – the next generation of engineers and scientists – to drive future breakthroughs in spaceflight.”
NASA’s Human Lander Challenge is sponsored by the agency’s Human Landing System Program within the Exploration Systems Development Mission Directorate and managed by the National Institute of Aerospace.
For more information on NASA’s 2025 Human Lander Challenge, including team progress, visit the challenge website.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
A core component of Gateway, humanity’s first space station around the Moon, is now on American soil and one step closer to launch. In lunar orbit, Gateway will support NASA’s Artemis campaign to return humans to the Moon and chart a path of scientific discovery toward the first crewed missions to Mars.
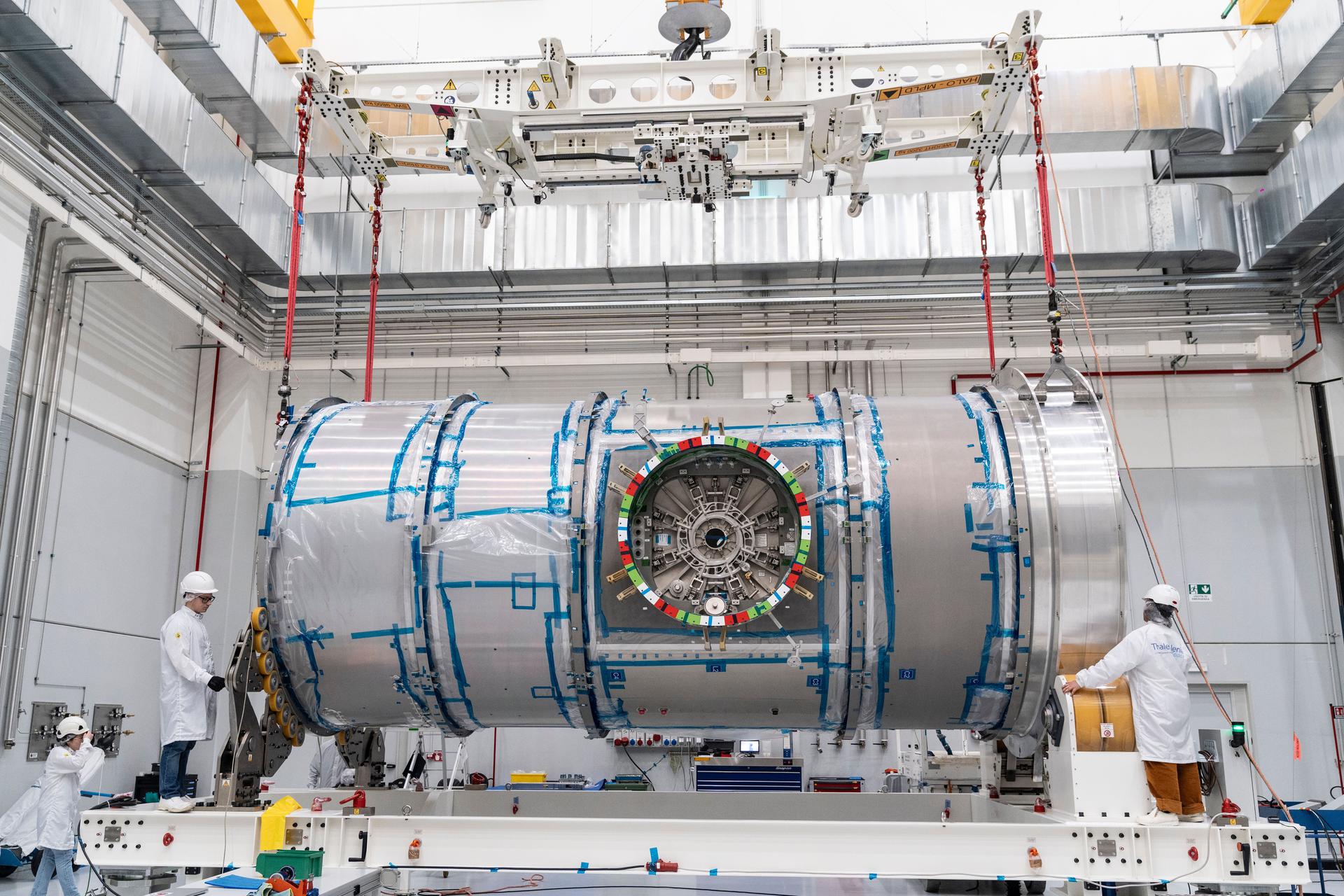
Gateway’s first pressurized module and one of its two foundational elements, HALO (Habitation and Logistics Outpost), arrived in Arizona on April 1. Fresh off a transatlantic journey from Thales Alenia Space in Turin, Italy, the structure will undergo final outfitting at Northrop Grumman’s integration and test facility in Gilbert before being integrated with Gateway’s Power and Propulsion Element at NASA’s Kennedy Space Center in Florida. The pair of modules will launch together on a SpaceX Falcon Heavy rocket.
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO will provide Artemis astronauts with space to live, work, conduct scientific research, and prepare for missions to the lunar surface. It will offer command and control, data handling, energy storage, electrical power distribution, thermal regulation, and communications and tracking via Lunar Link, a high-rate lunar communication system provided by ESA (European Space Agency). The module will include docking ports for visiting vehicles such as NASA’s Orion spacecraft, lunar landers, and logistics modules. It will also support both internal and external science payloads, enabling research and technology demonstrations in the harsh deep space environment.
Built with industry and international partners, Gateway will support sustained exploration of the Moon, serve as a platform for science and international collaboration, and act as a proving ground for the technologies and systems needed for future human missions to Mars.
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
At the Thales Alenia Space facility in Turin, Italy, technicians prepare Gateway’s HALO (Habitation and Logistics Outpost) for transport. The module’s primary structure, fabricated by Thales Alenia Space, will travel to Northrop Grumman’s facility in Gilbert, Arizona, for final outfitting ahead of its launch to lunar orbit.
Thales Alenia Space
At the Thales Alenia Space facility in Turin, Italy, technicians prepare Gateway’s HALO (Habitation and Logistics Outpost) for transport. The module’s primary structure, fabricated by Thales Alenia Space, will travel to Northrop Grumman’s facility in Gilbert, Arizona, for final outfitting ahead of its launch to lunar orbit.
Thales Alenia Space
At the Thales Alenia Space facility in Turin, Italy, technicians prepare Gateway’s HALO (Habitation and Logistics Outpost) for transport. The module’s primary structure, fabricated by Thales Alenia Space, will travel to Northrop Grumman’s facility in Gilbert, Arizona, for final outfitting ahead of its launch to lunar orbit.
Thales Alenia Space
At the Thales Alenia Space facility in Turin, Italy, technicians prepare Gateway’s HALO (Habitation and Logistics Outpost) for transport. The module’s primary structure, fabricated by Thales Alenia Space, will travel to Northrop Grumman’s facility in Gilbert, Arizona, for final outfitting ahead of its launch to lunar orbit.
Thales Alenia Space
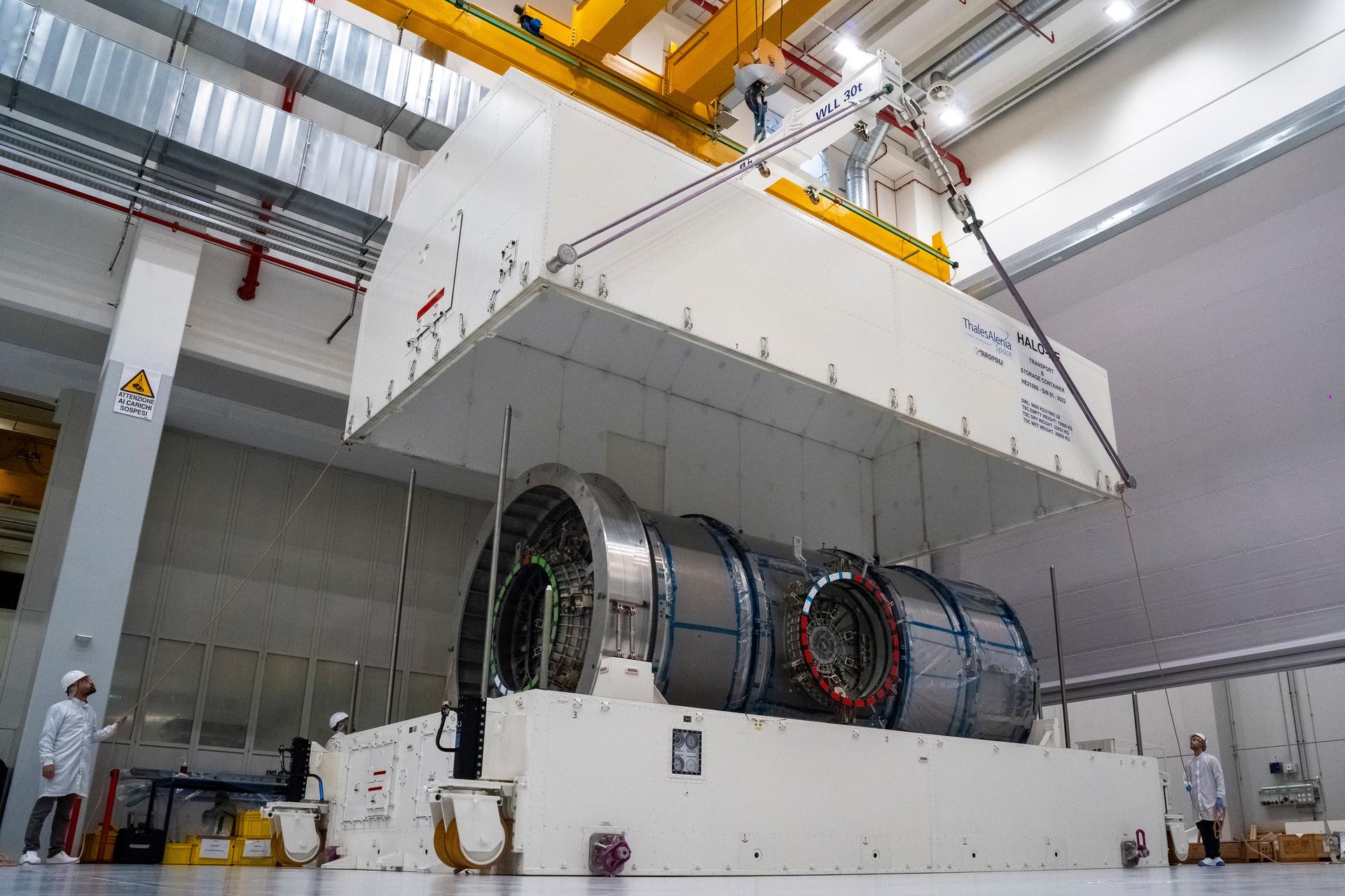
Gateway’s HALO (Habitation and Logistics Outpost) departs Italy en route to Arizona, where it will undergo final outfitting at Northrop Grumman’s facility in Gilbert ahead of its launch to lunar orbit. The module’s primary structure was fabricated by Thales Alenia Space in Turin.
Thales Alenia Space
Gateway’s HALO (Habitation and Logistics Outpost) departs Italy en route to Arizona, where it will undergo final outfitting at Northrop Grumman’s facility in Gilbert ahead of its launch to lunar orbit. The module’s primary structure was fabricated by Thales Alenia Space in Turin.
Thales Alenia Space
Gateway’s HALO (Habitation and Logistics Outpost) departs Italy en route to Arizona, where it will undergo final outfitting at Northrop Grumman’s facility in Gilbert ahead of its launch to lunar orbit. The module’s primary structure was fabricated by Thales Alenia Space in Turin.
Thales Alenia Space
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO (Habitation and Logistics Outpost) arrives in Mesa, Arizona, after traveling from Italy, where Thales Alenia Space fabricated its primary structure. Delivered by cargo aircraft to Phoenix-Mesa Gateway Airport, HALO will be transported to Northrop Grumman’s facility in Gilbert for final outfitting.
NASA/Josh Valcarcel
Gateway’s HALO arrives inside Northrop Grumman’s facility in Gilbert, Arizona, after its transatlantic journey from Italy.
This NASA/ESA Hubble Space Telescope image features the picturesque spiral galaxy NGC 4941.
ESA/Hubble & NASA, D. Thilker
This NASA/ESA Hubble Space Telescope image features the picturesque spiral galaxy NGC 4941, which lies about 67 million light-years from Earth in the constellation Virgo (The Maiden). Because this galaxy is nearby, cosmically speaking, Hubble’s keen instruments are able to pick out exquisite details such as individual star clusters and filamentary clouds of gas and dust.
The data used to construct this image were collected as part of an observing program that investigates the star formation and stellar feedback cycle in nearby galaxies. As stars form in dense, cold clumps of gas, they begin to influence their surroundings. Stars heat and stir up the gas clouds in which they form through winds, starlight, and — eventually, for massive stars — by exploding as supernovae. These processes are collectively called stellar feedback, and they influence the rate at which a galaxy can form new stars.
As it turns out, stars aren’t the only entities providing feedback in NGC 4941. At the heart of this galaxy lies an active galactic nucleus: a supermassive black hole feasting on gas. As the black hole amasses gas from its surroundings, the gas swirls into a superheated disk that glows brightly at wavelengths across the electromagnetic spectrum. Similar to stars — but on a much, much larger scale — active galactic nuclei shape their surroundings through winds, radiation, and powerful jets, altering not only star formation but also the evolution of the galaxy as a whole.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
Drones were a key part of testing new technology in support of a prescribed burn in Geneva State Forest, which is about 100 miles south of Montgomery, Alabama. The effort is part of the agency’s multi-year FireSense project, which is aimed at testing technologies that could eventually serve the U.S. Forest Service as well as local, state, and other federal wildland fire agencies. From left are Tim Wallace and Michael Filicchia of the Desert Research Institute in Nevada; Derek Abramson, Justin Hall, and Alexander Jaffe of NASA’s Armstrong Flight Research Center in Edwards California; and Alana Dachtler of International Met Systems of Kentwood, Michigan.
NASA/Jackie Shuman
Advancements in NASA’s airborne technology have made it possible to gather localized wind data and assess its impacts on smoke and fire behavior. This information could improve wildland fire decision making and enable operational agencies to better allocate firefighters and resources. A small team from NASA’s Armstrong Flight Research Center in Edwards, California, is demonstrating how some of these technologies work.
Two instruments from NASA’s Langley Research Center in Hampton, Virginia – a sensor gathering 3D wind data and a radiosonde that measures temperature, barometric pressure, and humidity data – were installed on NASA Armstrong’s Alta X drone for a prescribed burn in Geneva State Forest, which is about 100 miles south of Montgomery, Alabama. The effort is part of the agency’s multi-year FireSense project, which is aimed at testing technologies that could eventually serve the U.S. Forest Service as well as local, state, and other federal wildland fire agencies.
“The objectives for the Alta X portion of the multi-agency prescribed burn include a technical demonstration for wildland fire practitioners, and data collection at various altitudes for the Alabama Forestry Commission operations,” said Jennifer Fowler, FireSense project manager. “Information gathered at the different altitudes is essential to monitor the variables for a prescribed burn.”
Those variables include the mixing height, which is the extent or depth to which smoke will be dispersed, a metric Fowler said is difficult to predict. Humidity must also be above 30% for a prescribed burn. The technology to collect these measurements locally is not readily available in wildland fire operations, making the Alta X and its instruments key in the demonstration of prescribed burn technology.
A drone from NASA’s Armstrong Flight Research Center, Edwards, California, flies with a sensor to gather 3D wind data and a radiosonde that measures temperature, barometric pressure, and humidity data from NASA’s Langley Research Center in Hampton, Virginia. The drone and instruments supported a prescribed burn in Geneva State Forest, which is about 100 miles south of Montgomery, Alabama. The effort is part of the agency’s multi-year FireSense project, which is aimed at testing technologies that could eventually serve the U.S. Forest Service as well as local, state, and other federal wildland fire agencies.
International Met Systems/Alana Dachtler
In addition to the Alta X flights beginning March 25, NASA Armstrong’s B200 King Air will fly over actively burning fires at an altitude of about 6,500 feet. Sensors onboard other aircraft supporting the mission will fly at lower altitudes during the fire, and at higher altitudes before and after the fire for required data collection. The multi-agency mission will provide data to confirm and adjust the prescribed burn forecast model.
Small, uncrewed aircraft system pilots from NASA Armstrong completed final preparations to travel to Alabama and set up for the research flights. The team – including Derek Abramson, chief engineer for the subscale flight research laboratory; Justin Hall, NASA Armstrong chief pilot of small, uncrewed aircraft systems; and Alexander Jaffe, a drone pilot – will set up, fly, observe airborne operations, all while keeping additional aircraft batteries charged. The launch and recovery of the Alta X is manual, the mission profile is flown autonomously to guarantee the same conditions for data collection.
“The flight profile is vertical – straight up and straight back down from the surface to about 3,000 feet altitude,” Abramson said. “We will characterize the mixing height and changes in moisture, mapping out how they both change throughout the day in connection with the burn.”
In August 2024, a team of NASA researchers used the NASA Langley Alta X and weather instruments in Missoula, Montana, for a FireSense project drone technology demonstration. These instruments were used to generate localized forecasting that provides precise and sustainable meteorological data to predict fire behavior and smoke impacts.
Justin Link, left, pilot for small uncrewed aircraft systems, and Justin Hall, chief pilot for small uncrewed aircraft systems, install weather instruments on an Alta X drone at NASAs Armstrong Flight Research Center in Edwards, California. Members of the center’s Dale Reed Subscale Flight Research Laboratory used the Alta X to support the agency’s FireSense project in March 2025 for a prescribed burn in Geneva State Forest, which is about 100 miles south of Montgomery, Alabama.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
Getty Images
University Student Research Challenge (USRC) seeks to challenge students to propose new ideas/concepts that are relevant to NASA Aeronautics. USRC will provide students, from accredited U.S. colleges or universities, with grants for their projects and with the challenge of raising cost share funds through a crowdfunding campaign. The process of creating and implementing a crowdfunding campaign acts as a teaching accelerator – requiring students to act like entrepreneurs and raise awareness about their research among the public.
The solicitation goal can be accomplished through project ideas such as advancing the design, developing technology or capabilities in support of aviation, by demonstrating a novel concept, or enabling advancement of aeronautics-related technologies.
Eligibility: NASA funding is available to all accredited U.S. institutions of higher education (e.g. universities, four-year colleges, community colleges, or other two-year institutions). Students must be currently enrolled (part-time or full-time) at the institution. NASA has no set expectations as to the team size. The number of students participating in the investigation is to be determined by the scope of the project and the student Team Leader.
The USRC solicitation is currently Closed with Proposals next due June 26, 2025. Please visit NSPIRES to receive alerts when more information is available.
A USRC Q&A/Info Session and Proposal Workshop will be held May 12, 2025, at 2pm ET ahead of the USRC Submission deadline in June 2025. Join the Q&A
Please email us at HQ-USRC@mail.nasa.gov if you have any questions or to schedule a 1 on 1.
USRC Awards
Context-Aware Cybersecurity for UAS Traffic Management (Texas A&M University) Developing, testing, and pursuing transition of an aviation-context-aware network authentication and segmentation function, which holistically manages cyber threats in future UAS traffic control systems. Student Team:Vishwam Raval (Team Lead), Michael Ades, Garett Haynes, Sarah Lee, Kevin Lei, Oscar Leon, McKenna Smith, Nhan Nick Truong Faculty Mentors: Jaewon Kim and Sandip Roy Selected: 2025
Reconnaissance and Emergency Aircraft for Critical Hurricane Relief (North Carolina State University) Developing and deploying advanced unmanned aerial systems designed to locate, communicate with, and deliver critical supplies to stranded individuals in the wake of natural disasters. Student Team: Tobias Hullette (Team Lead), Jose Vizcarrondo, Rishi Ghosh, Caleb Gobel, Lucas Nicol, Ajay Pandya, Paul Randolph, Hadie Sabbah Faculty Mentor:Felix Ewere Selected: 2025
Design and Prototyping of a 9-phase Dual-Rotor Motor for Supersonic Electric Turbofan (Colorado School of Mines) Designing and prototyping a scaled-down 9-phase dual-rotor motor (DRM) for a supersonic electric turbofan. Student Team:Mahzad Gholamian (Team Lead), Garret Reader, Mykola Mazur, Mirali Seyedrezaei Faculty Mentor:Omid Beik Selected: 2024
Project F.I.R.E (Fire Intervention Retardant Expeller) (Cerritos Community College) Mitigating wildfires with drone released fire retardant pellets. Student Team:Angel Ortega Barrera (Team Lead), Larisa Mayoral, Paola Mayoral Jimenez, Jenny Rodriguez, Logan Stahl, Juan Villa Faculty Mentor:Janet McLarty-Schroeder Selected: 2024
Learning cooperative policies for adaptive human-drone teaming in shared airspace (Cornell University) Enabling new coordination and communication models for smoother, more efficient, and robust air traffic flow. Student Team:Mehrnaz Sabet (Team Lead), Aaron Babu, Marcus Lee, Joshua Park, Francis Pham, Owen Sorber, Roopak Srinivasan, Austin Zhao Faculty Mentor:Sanjiban Choudhury, Susan Fussell Selected: 2024 Crowdfunding Website
Investigation on Cryogenic Fluid Chill-Down Time for Supersonic Transport Usage (University of Washington, Seattle) Investigating reducing the boil-off of cryogenic fluids in pipes using vortex generators. Student Team:Ryan Fidelis (Team Lead), Alexander Ala, Kaleb Shaw Faculty Mentor:Fiona Spencer, Robert Breidenthal Selected: 2024 Crowdfunding Website
Clean Forever-Flying Drones: Utilizing Ocean Water for Hydrogen Extraction in Climate Monitoring (Purdue University) An ocean-based fueling station and a survey drone that can refuel in remote areas. Student Team:Holman Lau (Team Lead), Nikolai Baranov, Andrej Damjanov, Chloe Hardesty, Smit Kapadia Faculty Mentor: Li Qiao Selected:2023 Crowdfunding Website
Intelligent drone for detection of people during emergency response operation (Louisiana State University and A&M College) Using machine learning algorithms for images and audio data, integrated with gas sensing for real-time detection of people on UAS. Student Team:Jones Essuman (Team Lead), Tonmoy Sarker, Samer Tahboub Faculty Mentor:Xiangyu Meng Selected:2023 Crowdfunding Website
Advancing Aerospace Materials Design through High-Fidelity Computational Peridynamic Modeling and Modified SVET Validation of Corrosion Damage (California State University, Channel Islands) Modeling electrochemical corrosion nonlocally and combining efforts from bond-based and state-based theory. Student Team:Trent Ruiz (Team Lead), Isaac Cisneros, Curtis Hauck Faculty Mentor:Cynthia Flores Selected:2023 Crowdfunding Website
Swarm Micro UAVs for Area Mapping in GPS-denied Areas (Embry-Riddle Aeronautical University) Using swarm robotics to map complex environments and harsh terrain with Micro Aerial Vehicles (MAVs) Student Team:Daniel Golan (Team Lead), Stanlie Cerda-Cruz, Kyle Fox, Bryan Gonzalez, Ethan Thomas Faculty Mentor:Sergey V. Drakunov Selected:2023 Crowdfunding Website
AeroFeathers—Feathered Airfoils Inspired by the Quiet Flight of Owls (Michigan Tech University) Creating new propeller blades and fixed wing design concepts that mimic the features of an owl feather and provide substantial noise reduction benefits. Student Team:William Johnston (Team Lead), Pulitha Godakawela Kankanamalage, Amulya Lomte, Maria Jose Carrillo Munoz, Brittany Wojciechowski, Laura Paige Nobles, Gabrielle Mathews Faculty Mentor:Bhisham Sharma Selected:2023 Crowdfunding Website
Laser Energized Aerial Drone System (LEADS) for Sustained Sensing Applications (Michigan State University) Laser based, high-efficiency optical power transfer for UAV charging for sustained flight and monitoring. Student Team:Gavin Gardner (Team Lead), Ryan Atkinson, Brady Berg, Ross Davis, Gryson Gardner, Malachi Keener, Nicholas Michaels Faculty Mentor:Woongkul Lee Selected:2023 Crowdfunding Website
UAM Contingency Diagnosis Toolkit (Ohio State University) A UAM contingency diagnosis toolkit which that includes cognitive work requirements (CWRs) for human operators, information sharing requirements, and representational designs. Student Team:Connor Kannally (Team Lead), Izzy Furl, Luke McSherry, Abhinay Paladugu Faculty Mentor:Martijn IJtsma Selected:2023 Crowdfunding Website
Hybrid Quadplane Search and Rescue Missions (NC A&T University) An autonomous search and rescue quadplane UAS supported by an unmanned mobile landing platform/recharge station ground vehicle. Student Team:Luis Landivar Olmos (Team Lead), Dakota Price, Amilia Schimmel, Sean Tisdale Faculty Mentor:A. Homaifar Selected:2023 Crowdfunding Website
Drone Based Water Sampling and Quality Testing – Special Application in the Raritan River (Rutgers University, New Brunswick) An autonomous water sampling drone system. Student Team:Michael Leitner (Team Lead), Xavier Garay, Mohamed Haroun, Ruchit Jathania, Caleb Lippe, Zachary Smolder, Chi Hin Tam Faculty Mentor:Onur Bilgen Selected:2023 Crowdfunding Website
Low Cost and Efficient eVTOL Platform Leveraging Opensource for Accessibility (University of Nevada, Las Vegas) Lowering the barrier of entry into eVTOL deployment and development with a low cost, efficient, and open source eVTOL platform Student Team:Martin Arguelles-Perez (Team Lead), Benjamin Bishop, Isabella Laurito, Genaro Marcial Lorza, Eman Yonis Faculty Mentor:Venkatesan Muthukumar Selected:2022
Applying Space-Based Estimation Techniques to Drones in GPS-Denied Environments (University Of Texas, Austin) Taking real-time inputs from flying drones and outputting an accurate state estimation with 3-D error ellipsoid visualization Student Team:James Mitchell Roberts (Team Lead), Lauren Byram, Melissa Pires Faculty Mentor:Adam Nokes Selected:2022 Crowdfunding Website
Urban Cargo Delivery Using eVTOL Aircrafts (University Of Illinois, Chicago) A bi-objective optimization formulation minimizing total run costs of a two-leg cargo delivery system and community noise exposure to eVTOL operations Student Team:Nahid Parvez Farazi (Team Lead), Amy Hofstra, Son Nguyen Faculty Mentor:Bo Zou Selected:2022 Crowdfunding Website
AeroZepp: Aerostat Enabled Drone Glider Delivery System / Whisper Ascent: Quiet Drone Delivery (University of Delaware) An aerostat enabled low-energy UAV payload delivery system Student Team:Wesley Connor (Team Lead), Abubakarr Bah, Karlens Senatus Faculty Mentor:Suresh Advani Selected:2022 Crowdfunding Website
Sustainable Transport Research Aircraft for Test Operation (STRATO) (Rutgers University, New Brunswick) An open source, efficiently driven, optimized Active Flow Control (AFC) enhanced control surface for UAV research platforms Student Team:Daulton James (Team Lead), Jean Alvarez, Frederick Diaz, Michael Ferrell, Shriya Khera, Connor Magee, Roy Monge Hidalgo, Bertrand Smith Faculty Mentor:Edward DeMauro Selected:2022 Crowdfunding Website
Dronehook: A Novel Fixed-Wing Package Retrieval System (University Of Notre Dame) Envisioning a world where items can be retrieved from remote locations in a simple fashion from efficient fixed-wing UAVs Student Team:Konrad Rozanski (Team Lead), Dillon Coffey, Bruce Smith, Nicholas Orr Faculty Mentor:Jane Cleland-Huang Selected:2021 Crowdfunding Website
Aerial Intra-city Delivery Electric Drones (AIDED) with High Payload Capacity (Michigan State University) A high-payload capacity delivery drone capable of safely latching and charging on electrified public transportation systems Student Team:Yuchen Wang (Team Lead), Hunter Carmack, Kindred Griffis, Luke Lewallen, Scott Newhard, Caroline Nicholas, Shukai Wang, Kyle White Faculty Mentor:Woongkul Lee Selected:2021 AIDED Crowdfunding Website
Robotic Fabrication Work Cell for Customizable Unmanned Aerial Systems (Virginia Polytechnic Institute & State University) A robotic, multi-process work cell to autonomously fabricate topologically optimized UASs tailored for immediate application needs Student Team:Tadeusz Kosmal (Team Lead), Kieran Beaumont, Om Bhavsar, Eric Link, James Lowe Faculty Mentor:Christopher Williams Selected:2021 Crowdfunding Website
Real Time Quality Control in Additive Manufacturing Using In-Process Sensing and Machine Learning (Cornell University) A high-precision and low-cost intelligent sensor-based quality control technology for Additive Manufacturing Student Team:Adrita Dass (Team Lead), Talia Turnham, Benjamin Steeper, Chenxi Tian, Siddharth Patel, Akula Sai Pratyush, Selina Kirubakar Faculty Mentor:Atieh Moridi Selected:2021 Crowdfunding Website
AVIATA: Autonomous Vehicle Infinite Time Apparatus (University of California, Los Angeles) A drone swarm system capable of carrying a payload in the air indefinitely Student Team:Chirag Singh (Team Lead), Ziyi Peng, Bhrugu Mallajosyula, Willy Teav, David Thorne, James Tseng, Eric Wong, Axel Malahieude, Ryan Nemiroff, Yuchen Yao, Lisa Foo Faculty Mentor:Jeff Eldredge Selected:2020 Crowdfunding Website
Redundant Flight Control System for BVLOS UAV Operations (Embry-Riddle Aeronautical University) A redundant flight control system as a “back-up” to the primary flight computer to enhance safety of sUAS Student Team:Robert Moore (Team Lead), Joseph Ayd, and Todd Martin Faculty Mentor:John Robbins Selected:2020 Crowdfunding Website
AVIS: Active Vortex Inducing System for Flow Separation Control to Improve Airframe Efficiency (Georgia Institute of Technology) Use an array of vortex generators that can be adjusted throughout flight to increase wing efficiency Student Team:Michael Gamarnik (Team Lead), Shiva Khanna Yamamoto, Noah Mammen, Tommy Schrager, Bethe Newgent Faculty Mentor:Kelly Griendling Selected:2020 Go to AVIS team site
Hybrid Airplanes – An Optimum and Modular Approach (California Polytechnic State University, San Luis Obispo) Model and test powertrain to maximize the efficiency of hybrid airplanes Student Team:Nicholas Ogden (Team Lead), Joseph Shy, Brandon Bartlett, Ryker Bullis, Chino Cruz, Sara Entezar, Aaron Li, Zach Yamauchi Faculty Mentor:Paulo Iscold Selected:2019 A recorded USRC Tech Talk on this topic
ATLAS Air Transportation (South Dakota State University) A multipurpose, automated drone capable of comfortably lifting the weight of an average person Student Team:Isaac Smithee (Team Lead), Wade Olson, Nicolas Runge, Ryan Twedt, Anthony Bachmeier, Matthew Berg, Sterling Berg Faculty Mentors:Marco Ciarcia, Todd Letcher Selected:2019 A recorded USRC Tech Talk #1 and USRC Tech Talk #2 on ATLAS
Software-Defined GPS Augmentation Network for UAS Navigation (University Of Oklahoma, Norman) A novel solution of enhanced GPS navigation for unmanned aerial vehicles Student Team:Robert Rucker (Team Lead), Alex Zhang, Jakob Fusselman, Matthew GilliamMentors: Dr. Yan (Rockee) Zhang (Faculty Mentor), Dr Hernan Suarez (Team Technical Mentor) Faculty Mentors:Marco Ciarcia, Todd Letcher Selected:2019 Crowdfunding Website
UAV Traffic Information Exchange Network (Purdue University) A blockchain-inspired secure, scalable, distributed, and efficient communication framework to support large scale UAV operations Student Team:Hsun Chao (Team Lead) and Apoorv Maheshwari Faculty Mentors:Daniel DeLaurentis (Faculty Mentor), Shashank Tamaskar Selected:2018 Web Article: “Student-developed communication network for UAVs interests NASA“ The recorded poster session at the TACP Showcase 2021
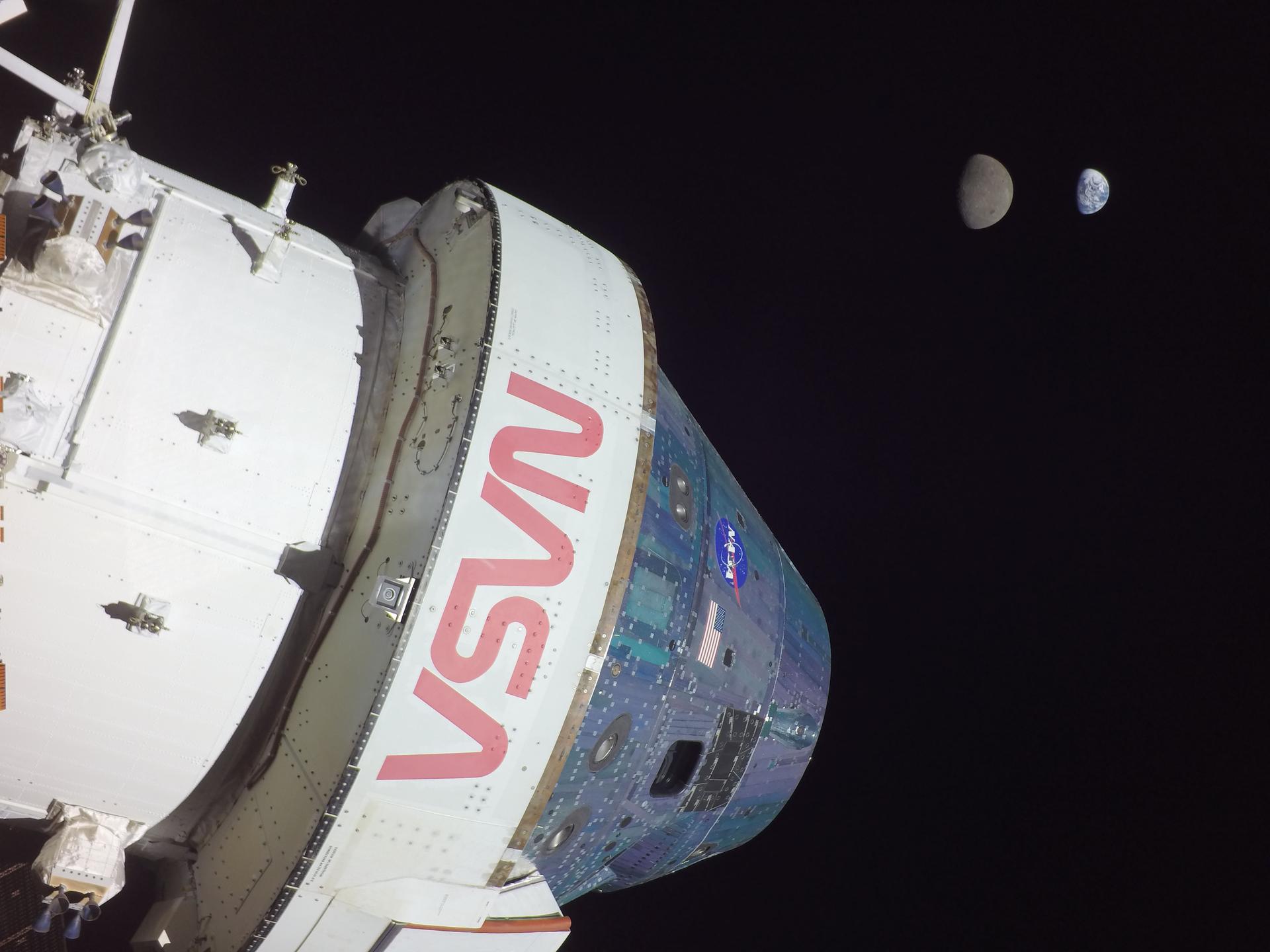
The four astronauts who will be the first to fly to the Moon under NASA’s Artemis campaign have designed an emblem to represent their mission that references both their distant destination and the home they will return to. The crew unveiled their patch in this April 2, 2025, photo.
The crew explained the patch’s symbolism, and its play on the abbreviation of Artemis II to AII, with the following description: The Artemis II test flight begins when a mighty team launches the first crew of the Artemis generation. This patch designates the mission as “AII,” signifying not only the second major flight of the Artemis campaign, but also an endeavor of discovery that seeks to explore for all and by all. Framed in Apollo 8’s famous Earthrise photo, the scene of the Earth and the Moon represents the dual nature of human spaceflight, both equally compelling: The Moon represents our exploration destination, focused on discovery of the unknown. The Earth represents home, focused on the perspective we gain when we look back at our shared planet and learn what it is to be uniquely human. The orbit around Earth highlights the ongoing exploration missions that have enabled Artemis to set sights on a long-term presence on the Moon and soon, Mars.
Commander Reid Wiseman, pilot Victor Glover, and mission specialist Christina Koch from NASA, and mission specialist Jeremy Hansen from CSA (Canadian Space Agency), will venture around the Moon in 2026 on Artemis II. The 10-day flight will test NASA’s foundational human deep space exploration capabilities, the SLS rocket, Orion spacecraft, for the first time with astronauts. Through Artemis, NASA will send astronauts to explore the Moon for scientific discovery, economic benefits, and build the foundation for the first crewed missions to Mars.
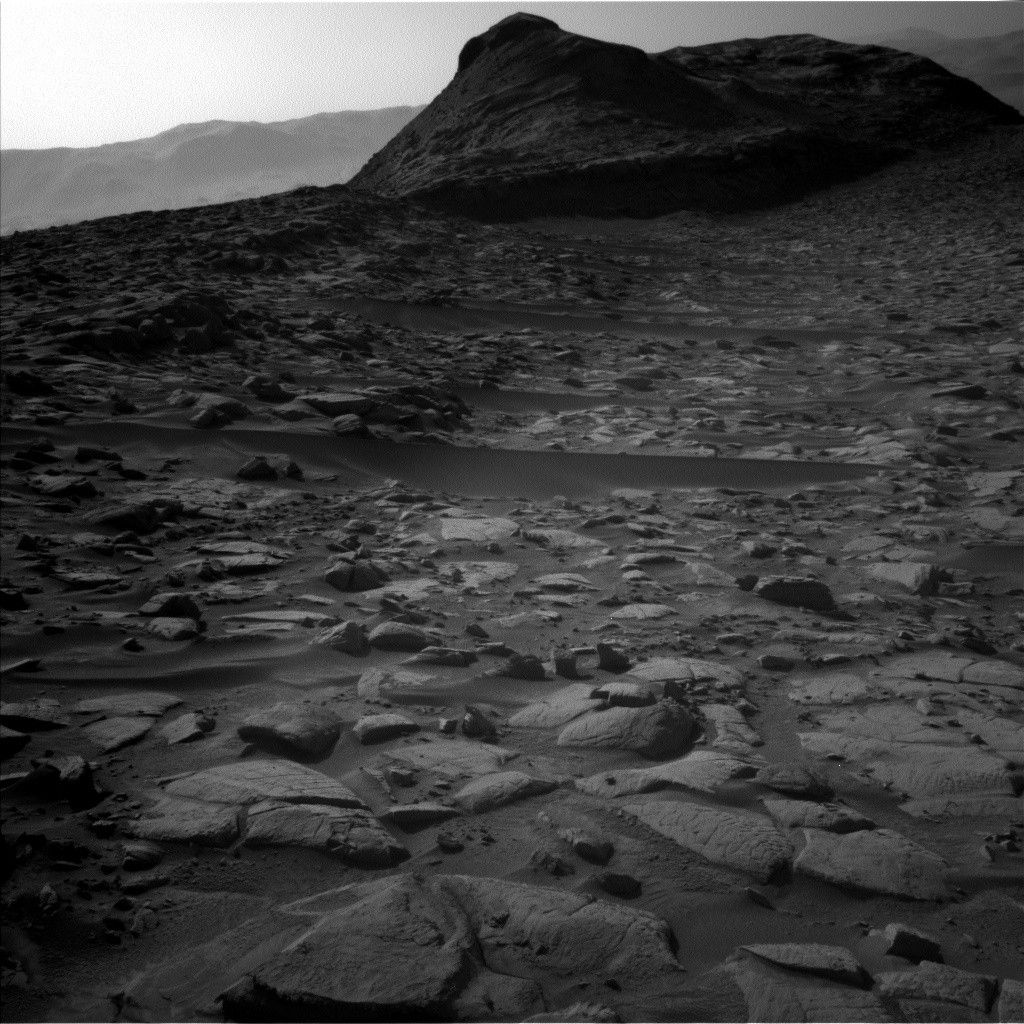
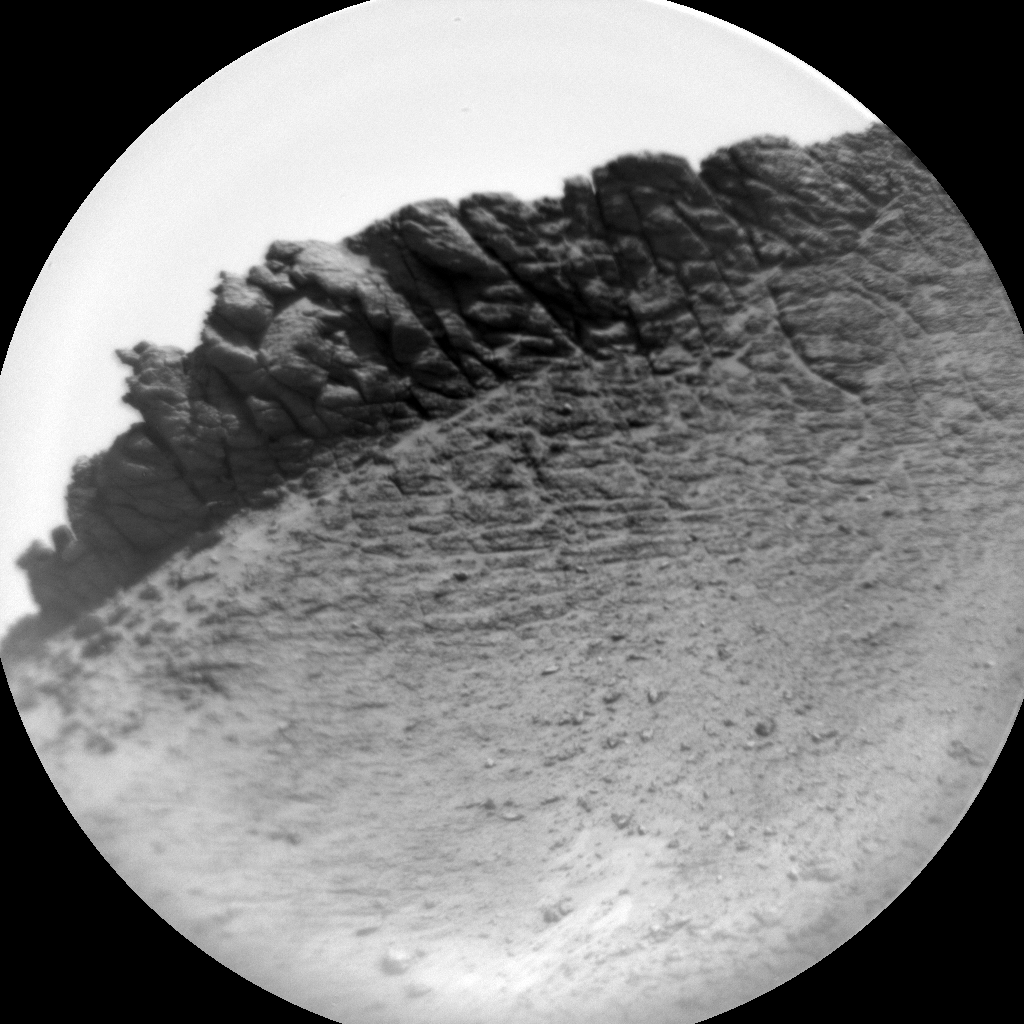
NASA’s Mars rover Curiosity acquired this image using its Left Navigation Camera on March 30, 2025 — Sol 4496, or Martian day 4,496 of the Mars Science Laboratory mission — at 20:12:48 UTC.
NASA/JPL-Caltech
Written by Conor Hayes, Graduate Student at York University
Earth planning date: Monday, March 31, 2025
Planning today began with two pieces of great news. First, our 50-meter drive (about 164 feet) from the weekend plan completed successfully, bringing us oh-so-close to finally driving out of the small canyon that we’ve been traversing through and toward the “boxwork” structures to our southwest. Second, we passed our “Slip Risk Assessment Process” (SRAP), confirming that all six of Curiosity’s wheels are parked firmly on solid ground. Avid readers of this blog will be familiar with last week’s SRAP challenges, which prevented us from using the rover’s arm for the entire week. With a green light on SRAP, we were finally able to put our suite of contact science instruments back to work today.
The arm gets to work early on the first sol of this plan, with an APXS integration on “Los Osos,” a bedrock target in our workspace, after it has been cleared of the ubiquitous Martian dust by DRT. The rest of our arm activities consist of a series of MAHLI observations later in the afternoon, both of Los Osos and “Black Star Canyon.”
Of course, just because we managed to get contact science in this plan doesn’t mean we’re letting our remote sensing instruments take a break. In fact, we have more than two hours of remote sensing, split between the two sols and the two science teams (Geology and Mineralogy [GEO] and Atmosphere and Environment [ENV]). GEO will be using Mastcam to survey both the highs and the lows of the terrain, with mosaics of “Devil’s Gate” (some stratigraphy in a nearby ledge) and some small troughs close to the rover. We’ll also be getting even more Mastcam images of “Gould Mesa,” an imaging target in many previous plans, as we continue to drive past it. ChemCam gets involved with a LIBS observation of “Fishbowls,” which will also be imaged by Mastcam, a post-drive AEGIS, and two RMI mosaics of Gould Mesa and “Torote Bowl,” which was also imaged over the weekend.
ENV’s activities are fairly typical for this time of year as Curiosity monitors the development of the Aphelion Cloud Belt (ACB) with several Navcam cloud movies, as well as seasonal changes in the amount of dust in and above Gale with Navcam line-of-sight observations and Mastcam taus. We’ll also be taking a Navcam dust devil movie to see if we can catch any cold-weather wind-driven dust movement. ENV also filled this plan with their usual set of REMS, RAD, and DAN observations.
The drive planned today is significantly shorter than the one over the weekend, at just about 10 meters (about 33 feet). This is because we’re driving up a small ridge, which limits our ability to see what’s on the other side. Although our rover knows how to keep itself safe, we still prefer not to drive through terrain that we can’t see in advance, if it can be avoided. Once we’ve got a better eye on what lies in front of us, we will hopefully be able to continue our speedy trek toward the boxwork structures.
NASA astronaut Christopher Williams poses for a portrait at NASA’s Johnson Space Center in Houston, Texas.
Credit: NASA
NASA astronaut Chris Williams will embark on his first mission to the International Space Station, serving as a flight engineer and Expedition 74 crew member.
Williams will launch aboard the Roscosmos Soyuz MS-28 spacecraft in November, accompanied by Roscosmos cosmonauts Sergey Kud-Sverchkov and Sergei Mikaev. After launching from the Baikonur Cosmodrome in Kazakhstan, the trio will spend approximately eight months aboard the orbiting laboratory.
During his expedition, Williams will conduct scientific investigations and technology demonstrations that help prepare humans for future space missions and benefit humanity.
Selected as a NASA astronaut in 2021, Williams graduated with the 23rd astronaut class in 2024. He began training for his first space station flight assignment immediately after completing initial astronaut candidate training.
Williams was born in New York City, and considers Potomac, Maryland, his hometown. He holds a bachelor’s degree in Physics from Stanford University in California and a doctorate in Physics from the Massachusetts Institute of Technology in Cambridge, where his research focused on astrophysics. Williams completed Medical Physics Residency training at Harvard Medical School in Boston. He was working as a clinical physicist and researcher at the Brigham and Women’s Hospital in Boston when he was selected as an astronaut.
For more than two decades, people have lived and worked continuously aboard the International Space Station, advancing scientific knowledge and making research breakthroughs not possible on Earth. The station is a critical testbed for NASA to understand and overcome the challenges of long-duration spaceflight and to expand commercial opportunities in low Earth orbit. As commercial companies focus on providing human space transportation services and destinations as part of a robust low Earth orbit economy, NASA is able to more fully focus its resources on deep space missions to the Moon and Mars.
Learn more about International Space Station research and operations at:
Preparations for Next Moonwalk Simulations Underway (and Underwater)
A Martian dust devil can be seen consuming its smaller friend in this short video made of images taken at the rim of Jezero Crater by NASA’s Perseverance Mars rover on Jan. 25, 2025.
NASA/JPL-Caltech/SSI
The six-wheeled explorer recently captured several Red Planet mini-twisters spinning on the rim of Jezero Crater.
A Martian dust devil can be seen consuming a smaller one in this short video made of images taken by a navigation camera aboard NASA’s Perseverance Mars rover. These swirling, sometimes towering columns of air and dust are common on Mars. The smaller dust devil’s demise was captured during an imaging experiment conducted by Perseverance’s science team to better understand the forces at play in the Martian atmosphere.
When the rover snapped these images from about 0.6 miles (1 kilometer) away, the larger dust devil was approximately 210 feet (65 meters) wide, while the smaller, trailing dust devil was roughly 16 feet (5 meters) wide. Two other dust devils can also be seen in the background at left and center. Perseverance recorded the scene Jan. 25 as it explored the western rim of Mars’ Jezero Crater at a location called “Witch Hazel Hill.”
“Convective vortices — aka dust devils — can be rather fiendish,” said Mark Lemmon, a Perseverance scientist at the Space Science Institute in Boulder, Colorado. “These mini-twisters wander the surface of Mars, picking up dust as they go and lowering the visibility in their immediate area. If two dust devils happen upon each other, they can either obliterate one another or merge, with the stronger one consuming the weaker.”
While exploring the rim of Jezero Crater on Mars, NASA’s Perseverance rover captured new images of multiple dust devils in January 2025. These captivating phenomena have been documented for decades by the agency’s Red Planet robotic explorers. NASA/JPL-Caltech/LANL/CNES/CNRS/INTA-CSIC/Space Science Institute/ISAE-Supaero/University of Arizona
Science of Whirlwinds
Dust devils are formed by rising and rotating columns of warm air. Air near the planet’s surface becomes heated by contact with the warmer ground and rises through the denser, cooler air above. As other air moves along the surface to take the place of the rising warmer air, it begins to rotate. When the incoming air rises into the column, it picks up speed like a spinning ice skater bringing their arms closer to their body. The air rushing in also picks up dust, and a dust devil is born.
“Dust devils play a significant role in Martian weather patterns,” said Katie Stack Morgan, project scientist for the Perseverance rover at NASA’s Jet Propulsion Laboratory in Southern California. “Dust devil study is important because these phenomena indicate atmospheric conditions, such as prevailing wind directions and speed, and are responsible for about half the dust in the Martian atmosphere.”
NASA’s Viking 1 orbiter captured this Martian dust devil casting a shadow on Aug. 1, 1978. During the 15-second interval between the two images, the dust devil moved toward the northeast (toward the upper right) at a rate of about 59 feet (18 meters) per second.
NASA/JPL-Caltech/MSSS
Since landing in 2021, Perseverance has imaged whirlwinds on many occasions, including one on Sept. 27, 2021, where a swarm of dust devils danced across the floor of Jezero Crater and the rover used its SuperCam microphone to record the first sounds of a Martian dust devil.
NASA’s Viking orbiters, in the 1970s, were the first spacecraft to photograph Martian dust devils. Two decades later, the agency’s Pathfinder mission was the first to image one from the surface and even detected a dust devil passing over the lander. Twin rovers Spirit and Opportunity managed to capture their fair share of dusty whirlwinds. Curiosity, which is exploring a location called Mount Sharp in Gale Crater on the opposite side of the Red Planet as Perseverance, sees them as well.
Capturing a dust devil image or video with a spacecraft takes some luck. Scientists can’t predict when they’ll appear, so Perseverance routinely monitors in all directions for them. When scientists see them occur more frequently at a specific time of day or approach from a certain direction, they use that information to focus their monitoring to try to catch additional whirlwinds.
“If you feel bad for the little devil in our latest video, it may give you some solace to know the larger perpetrator most likely met its own end a few minutes later,” said Lemmon. “Dust devils on Mars only last about 10 minutes.”
More About Perseverance
A key objective of Perseverance’s mission on Mars is astrobiology, including caching samples that may contain signs of ancient microbial life. The rover is characterizing the planet’s geology and past climate, to help pave the way for human exploration of the Red Planet and as the first mission to collect and cache Martian rock and regolith.
NASA’s Mars Sample Return Program, in cooperation with ESA (European Space Agency), is designed to send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis.
The Mars 2020 Perseverance mission is part of NASA’s Mars Exploration Program (MEP) portfolio and the agency’s Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet.
NASA’s Jet Propulsion Laboratory, which is managed for the agency by Caltech, built and manages operations of the Perseverance rover.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
Eric Garza, técnico de ingeniería en el Taller de Fabricación Experimental del Centro de Investigación de Vuelos Armstrong de la NASA en Edwards, California, corta madera contrachapada a medida para las tablas del piso temporal del avión demostrador experimental X-66 el 26 de agosto de 2024.
La NASA diseño unas tablas de piso temporales para el avión MD-90, que se utilizaran mientras el avión se transforma en el demostrador experimental X-66. Estas tablas de piso protegerán el piso original y agilizarán el proceso de modificación.
En apoyo al proyecto Demostrador de Vuelo Sostenible de la agencia, un pequeño equipo del Taller de Fabricación Experimental del Centro de Investigación de Vuelos Armstrong de la NASA en Edwards, California, construyó tablas de piso temporales para ahorrarle tiempo y recursos al proyecto. La retirada e instalación repetidas del piso original durante el proceso de modificación requería mucho tiempo. El uso de paneles temporales también garantiza la protección de las tablas del piso original y su aptitud para el vuelo cuando se finalicen las modificaciones y se vuelva a instalar el piso original.
“La tarea de crear las tablas de piso temporales para el MD-90 implica un proceso meticuloso dirigido a facilitar las modificaciones, manteniendo la seguridad y la eficacia. La necesidad de estas tablas de piso temporales surge del detallado procedimiento necesario para retirar y reinstalar los pisos originales del fabricante (OEM, por su acrónimo inglés),” explica Jason Nelson, jefe de fabricación experimental. Él es uno de los dos miembros del equipo de fabricación – un técnico de ingeniería y un inspector – que fabrica acerca de 50 tablas de piso temporales, con dimensiones que varían entre 20 pulgadas por 36 pulgadas y 42 pulgadas por 75 pulgadas.
Una máquina de madera corta agujeros precisos en madera contrachapada para las tablas del piso temporal el 26 de agosto de 2024, en el Taller de Fabricación Experimental del Centro de Investigación de Vuelo Armstrong de la NASA en Edwards, California. El piso fue diseñado para el avión de demonstración experimental X-66.
NASA/Steve Freeman
Nelson continuó, “Como estas tablas OEM se quitarán y volverán a instalar varias veces para acomodar las modificaciones necesarias, las tablas temporales ahorrarán al equipo tiempo y recursos valiosos. También proporcionarán el mismo nivel de seguridad y resistencia que las tablas OEM, garantizando que el proceso se desarrolle sin problemas y sin comprometer la calidad.”
El diseño y la creación de prototipos del piso fue un proceso meticuloso, pero la solución temporal desempeña un papel crucial en la optimización del tiempo y los recursos en los esfuerzos de la NASA por avanzar en la seguridad y la eficiencia de los viajes aéreos. El proyecto Demostrador de Vuelo Sostenible de la agencia busca informar la próxima generación de aviones pasajeros de un solo pasillo, que son las aeronaves más comunes de aviación comercial de todo el mundo. La NASA se asoció con Boeing para desarrollar el avión de demostración experimental X-66. El Taller de Fabricación Experimental de Armstrong de la NASA lleva a cabo modificaciones y trabajos de reparación en aeronaves, que van desde la creación de algo tan pequeño como un soporte de aluminio hasta la modificación de la estructura principal de las alas, las costillas del fuselaje, las superficies de control y otras tareas de apoyo a las misiones.
Eric Garza, técnico de ingeniería en el Taller de Fabricación Experimental del Centro de Investigación de Vuelo Armstrong de la NASA en Edwards, California, observa cómo una máquina de madera corta agujeros para las tablas del piso temporal el 26 de agosto de 2024. El piso fue diseñado para el avión de demostración experimental X-66.
The first image of the Moon taken by the cameras on the Lunar Orbiter in 1966.
Credits: NASA
Landing safely on the surface of another planetary body, like the Moon or Mars, is one of the most important milestones of any given space mission. From the very beginning, NASA’s Langley Research Center has been at the heart of the entry, descent and landing (EDL) research that enables our exploration. Today, NASA Langley’s legacy of landing continues at the forefront of present day lunar missions and as NASA prepares for future travel to more distant worlds.
Project Mercury: 1958
Project Mercury was the United States’ first human-in-space program, led by NASA’s Space Task Group located at NASA Langley. There were five major programs of study and experimentation.
An airdrop study that helped us understand the characteristics of the Mercury capsule as it returned to Earth.
A group of study focused on the escape systems, ultimately becoming known as the launch abort system.
Exhaustive wind-tunnel studies of the blunt-nosed capsule design and its aerodynamic stability at various altitudes and speeds and angles of reentry, all with a focus on making the capsule safe and stable.
A study on the problem of landing impact, resulting in the development of absorption systems that minimized the shock of impact to the capsule’s pilot.
Studies into the use of drogue parachutes and their characteristics at high altitudes and speeds, ensuring that they would be able to stabilize and slow the capsule’s descent for a safe landing. All of this research went on to inform the subsequent Gemini and Apollo programs.
All of this research went on to inform the subsequent Gemini and Apollo programs.
Apollo Program: 1962
In 1961, President John F. Kennedy committed to putting Americans on the surface of the Moon and shortly after that historic declaration, NASA’s Apollo program was born. In the years that followed, the original team of NASA astronauts completed their basic training at NASA Langley’s Lunar Landing Research Facility (LLRF). When Apollo 11 successfully landed the first humans on the Moon in 1969, NASA Langley had played a pivotal role in the monumental success.
Lunar Orbiter: 1966
The Lunar Orbiter missions launched with the purpose of mapping the lunar surface and identifying potential landing sites ahead of the Apollo landings. From 1966 to 1967, the five successful Lunar Orbiter missions, led and managed by Langley Research Center, resulted in 99% of the moon photographed and a suitable site selected for the upcoming human landings.
Viking: 1976
After the success of Apollo, NASA set its sights further across the solar system to Mars. Two Viking missions aimed to successfully place landers on the Red Planet and capture high resolution images of the Martian surfaces, assisting in the search for life. Langley Research Center was chosen to lead this inaugural Mars mission and went on to play key roles in the missions to Mars that followed.
HIAD: 2009 – Present
Successful landings on Mars led to more ambitious dreams of landing larger payloads, including those that could support future human exploration. In order to land those payloads safely, a new style of heat shield would be needed. Hypersonic Inflatable Aerodynamic Decelerator (HIAD) technology was positioned as an answer to the payload problem, enabling missions to use inflatable heat shields to slow down and protect a payload as it enters a planet’s atmosphere at hypersonic speeds.
IRVE – 2009-2012
Two successful Inflatable Reentry Vehicle Experiments (IRVE) proved the capability of inflatable heat shield technology and opened the door for larger iterations.
LOFTID – 2022
The Low Earth Orbit Flight Test of an Inflatable Decelerator (LOFTID) followed in the footsteps of its predecessor IRVE with a larger aeroshell that could be deployed to a scale much larger than the shroud. The 2022 successful test of this technology further proved the capability of HIAD technology.
MEDLI 1 and 2: 2012 & 2020
As a part of the Mars Science Laboratory (MSL) mission, NASA Langley’s Mars Entry, Descent and Landing Instrument (MEDLI) was designed to gather data from the MSL entry vehicle’s heatshield during its entry and descent to the surface of Mars. MEDLI2 expanded on that groundbreaking data during the Mars 2020 mission which safely landed the Perseverance rover after successfully entering the planet’s arid atmosphere, and enabling improvements on the design for future entry systems.
Curiosity Rover
Curiosity was the largest and most capable rover ever sent to Mars when it launched in 2011. Leading up the mission, Langley engineers performed millions of simulations of the entry, descent and landing phase — or the so-called “Seven Minutes of Terror” — that determines success or failure. Curiosity continues to look for signs that Mars once was – or still is – a habitable place for life as we know it.
CLPS: 2023 – Present
The Commercial Lunar Payload Services initiative takes the Artemis mission further by working with commercial partners to advance the technology needed to return humans to the Moon and enable humanity to explore Mars.
NDL
Navigation Doppler Lidar (NDL) technology, developed at Langley Research Center, uses lasers to assist spacecraft in identifying safe locations to land. In 2024, NDL flew on the Intuitive Machines’ uncrewed Nova-C lander, with its laser instruments designed to measure velocity and altitude to within a few feet. While NASA planetary landers have traditionally relied on radar and used radio waves, NDL technology has proven more accurate and less heavy, both major benefits for cost and space savings as we continue to pursue planetary missions.
SCALPSS
Like Lunar Orbiter and the Viking missions before it, Stereo Cameras for Lunar Plume Surface Studies (SCALPSS) set out to better understand the surface of another celestial body. These cameras affixed to the bottom of a lunar lander focus on the interaction between the lander’s rocket plumes and the lunar surface. The SCALPSS 1.1 instrument captured first-of-its-kind imagery as the engine plumes of Firefly’s Blue Ghost lander reached the Moon’s surface. These images will serve as key pieces of data as trips to the Moon increase in the coming years.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
A Massachusetts Institute of Technology Lincoln Laboratory pilot controls a drone during NASA’s In-Time Aviation Safety Management System test series in collaboration with a George Washington University team July 17-18, 2024, at the U.S. Army’s Fort Devens in Devens, Massachusetts.
MIT Lincoln Laboratory/Jay Couturier
From agriculture and law enforcement to entertainment and disaster response, industries are increasingly turning to drones for help, but the growing volume of these aircraft will require trusted safety management systems to maintain safe operations.
NASA is testing a new software system to create an improved warning system – one that can predict hazards to drones before they occur. The In-Time Aviation Safety Management System (IASMS) will monitor, assess, and mitigate airborne risks in real time. But making sure that it can do all that requires extensive experimentation to see how its elements work together, including simulations and drone flight tests.
“If everything is going as planned with your flight, you won’t notice your in-time aviation safety management system working,” said Michael Vincent, NASA acting deputy project manager with the System-Wide Safety project at NASA’s Langley Research Center in Hampton, Virginia. “It’s before you encounter an unusual situation, like loss of navigation or communications, that the IASMS provides an alert to the drone operator.”
The team completed a simulation in the Human-Autonomy Teaming Laboratory at NASA’s Ames Research Center in California’s Silicon Valley on March 5 aimed at finding out how critical elements of the IASMS could be used in operational hurricane relief and recovery.
During this simulation, 12 drone pilots completed three 30-minute sessions where they managed up to six drones flying beyond visual line of sight to perform supply drops to residents stranded after a severe hurricane. Additional drones flew scripted search and rescue operations and levee inspections in the background. Researchers collected data on pilot performance, mission success, workload, and perceptions of the experiences, as well as the system’s usability.
This simulation is part of a longer-term strategy by NASA to advance this technology. The lessons learned from this study will help prepare for the project’s hurricane relief and recovery flight tests, planned for 2027.
As an example of this work, in the summer of 2024 NASA tested its IASMS during a series of drone flights in collaboration with the Ohio Department of Transportation in Columbus, Ohio, and in a separate effort, with three university-led teams.
For the Ohio Department of Transportation tests, a drone flew with the NASA-developed IASMS software aboard, which communicated back to computers at NASA Langley. Those transmissions gave NASA researchers input on the system’s performance.
Students from the Ohio State University participate in drone flights during NASA’s In-Time Aviation Safety Management System test series in collaboration with the Ohio Department of Transportation from March to July 2024 at the Columbus Aero Club in Ohio.
NASA/Russell Gilabert
NASA also conducted studies with The George Washington University (GWU), the University of Notre Dame, and Virginia Commonwealth University (VCU). These occurred at the U.S. Army’s Fort Devens in Devens, Massachusetts with GWU; near South Bend, Indiana with Notre Dame; and in Richmond, Virginia with VCU. Each test included a variety of types of drones, flight scenarios, and operators.
Students from Virginia Commonwealth University walk toward a drone after a flight as part of NASA’s In-Time Aviation Safety Management System (IASMS) test series July 16, 2024, in Richmond, Virginia.
NASA/Dave Bowman
Each drone testing series involved a different mission for the drone to perform and different hazards for the system to avoid. Scenarios included, for example, how the drone would fly during a wildfire or how it would deliver a package in a city. A different version of the NASA IASMS was used to fit the scenario depending on the mission, or depending on the flight area.
Students from the University of Notre Dame prepare a small drone for takeoff as part of NASA’s In-Time Aviation Safety Management System (IASMS) university test series, which occurred on August 21, 2024 in Notre Dame, Indiana.
University of Notre Dame/Wes Evard
When used in conjunction with other systems such as NASA’s Unmanned Aircraft System Traffic Management, IASMS may allow for routine drone flights in the U.S. to become a reality. The IASMS adds an additional layer of safety for drones, assuring the reliability and trust if the drone is flying over a town on a routine basis that it remains on course while avoiding hazards along the way.
“There are multiple entities who contribute to safety assurance when flying a drone,” Vincent said. “There is the person who’s flying the drone, the company who designs and manufactures the drone, the company operating the drone, and the Federal Aviation Administration, who has oversight over the entire National Airspace System. Being able to monitor, assess and mitigate risks in real time would make the risks in these situations much more secure.”
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.

















































































{kind=link}